4-DoF Robot – A Tutorial in MATLAB and Simulink
The forward kinematics problem is Calculating the matrix T4

Select the base coordinate system and attach the coordinate systems to the links.
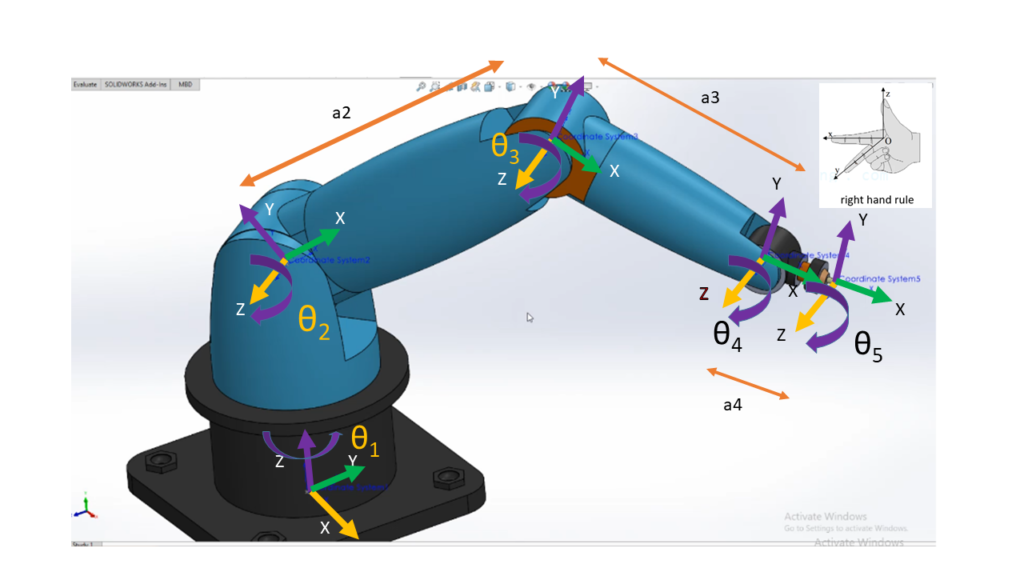
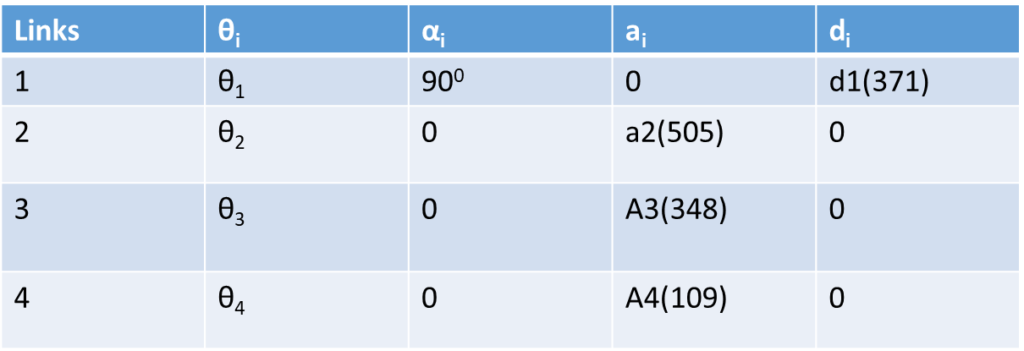
Kinematic parameter (Denavit – Hartenberg)
Θi :Angle of rotation about the Z axis
α : Angle of rotation of the Z axis around the X axis (positive counterclockwise)
ai : Distance between axes Z
di: Distance between axes Z
General Matrix
An=Rot(z,θ)Trans(0,0,d)Trans(a,0,0)Rot(x,α)
cosθ -sinθcosα sinθsinα a cosθ
sinθ cosθcosα -cosθsinα a sinθ
An = 0 sinα cosα d
0 0 0 1
Using Mat Lab to calculate the Matrix T4
T1 = [ C1 0 – S1 0;
S1 0 – C1 0;
0 -1 0 371;
0 0 0 1];
T2 = [ C2 – S2 0 505* C2;
S2 0 C2 505* S2;
0 0 1 0;
0 0 0 1];
T3 = [ C3 -S3 0 348*C3;
S3 C3 0 348*S3;
0 0 1 0;
0 0 0 1];
T4 = [ C4 -S4 0 109*C4;
S4 C4 0 109*S4;
0 0 1 0;
0 0 0 1];
T = T1*T2*T3*T4;
cos(θ1) =C1 ; cos(θ2) =C2 ; cos(θ3) =C3 ; cos(θ4) =C4 ;
sin(θ1) =S1; sin(θ2) =S2; sin(θ3) =S3; sin(θ4) = S4 .
INVERSE KINEMATIC Is calculating θ1; θ2;θ3; θ4
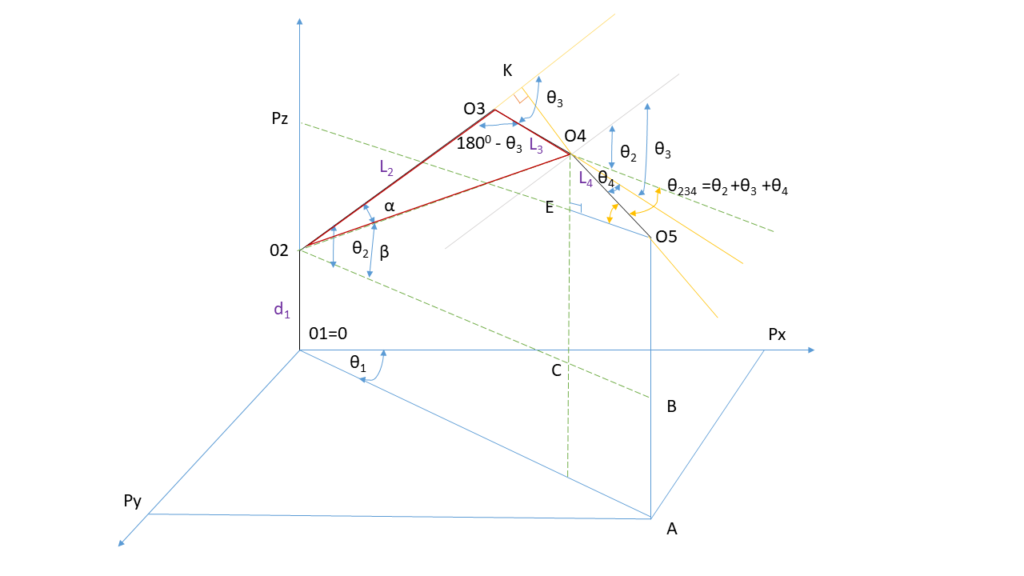
tan(θ1 )= Py / Px =>
θ1 = atan2d(Py , Px)
Triangle O2O3O4:
O2O42= O2O32 +O3O42 -2O2O3*O3O4 cos(1800 –θ3 )
cos(1800 –θ3 ) =-cos(θ3 )= ((L2 )2 + (L3 )2 – O2O4 )/2*L2L3
Triangle O2CO4:
O2O42 =O2C2 + O4C2
C234 = cos(θ234)
S234 = sin(θ234)
Triangle O5EO4:
O4 E= L4 *Sin(θ234 )=L4*S234
O5E=L4 *Cos(θ234 )=L4*C234
O2C = O2 B – BC = √(〖Py〗^2+〖Px〗^2 ) – L4*C234
O4C = O4 E + EC = PZ – d1 + L4*S234
C3=cos(θ3)
C3 =[( √(〖Py〗^2+〖Px〗^2 ) – L4*C234 )2 + (Pz – d1 + L4*S234 )2 – (L22 + L32 ) ]/2*L2*L3 ;
S3=√(1-〖C3〗^2 )
θ3 = atan2d(S3, C3)
Leave a Reply